La parte buena cuando construyo cosas en robótica es que puedo reutilizar los componentes de un proyecto a otro. Varias cajas llenas de sensores, controladores de motor y una amplia gama de kits. Lo que falta aquí es solo una idea y algo de tiempo para armarlo.
Construir un robot de control remoto – Paso a paso
Elegí usar un control remoto con un receptor, una plataforma móvil y uno de los potentes controladores de motor en el mercado, y al mismo tiempo, lo mejor de mi colección. El resultado es un robot controlado a distancia.
Tal proyecto requiere conocimientos básicos de electrónica (algo sobre voltaje, amperios, cómo usar cables de alimentación, soldadura, etc.). Además, este es un proyecto simple que puede finalizar en unas pocas horas.
Los componentes de hardware utilizados en el proyecto:
- El control remoto es un Flysky FS-T6-RB6 2.4GHz FS
- Encontré el control remoto de 2.4GHz y el receptor a buen precio en eBay, en algún lugar a principios de este año.
- El receptor con seis canales de radio vino incluido con el control remoto.
El chasis de aluminio
Compré el chasis hace dos años para usarlo en el exterior (en el parque, en la calle, etc.). Hasta ahora, no jugué mucho tiempo y no fuera del hogar. Las razones son las siguientes: bajo rendimiento de los motores de CC, ruedas de un plástico rígido rompible, espacio relativamente pequeño dentro del chasis, por lo que una mayor exposición de los componentes que se montan fuera de la plataforma.
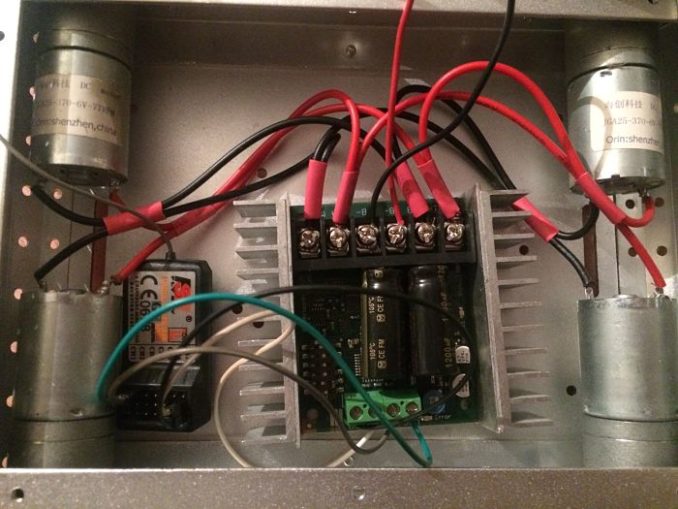
- El controlador de motor Sabertooth 2x25A
- Lo obtuve el año pasado y es un potente controlador de motor capaz de controlar motores DC de alto par. Los motores de CC utilizados en este chasis son de bajo consumo de energía, así como el rendimiento.
- Batería LiPo: la batería es de 7.4V Zippy con dos celdas y una velocidad de descarga de 20C.
- Cables de alimentación y herramientas
- Necesitaba algunos cables de alimentación, un destornillador y un soldador.
- Cables de alimentación y herramientas
¿Cómo ensamblar la electrónica?
Esta es quizás la parte más importante de este tutorial.
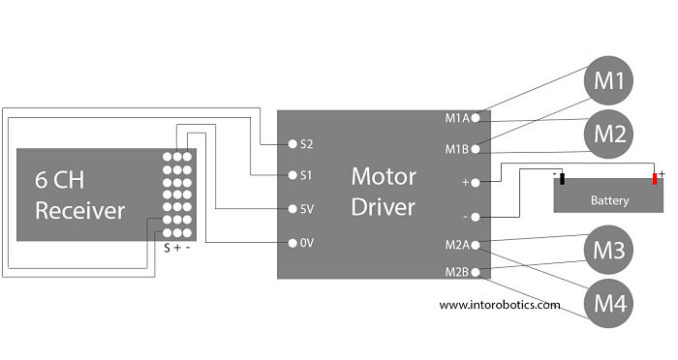
Como se muestra en la imagen anterior, solo se utilizan dos de los seis canales del receptor. Uno de ellos está conectado al canal de entrada S2, y el canal 2 está conectado a la entrada S1 del controlador del motor.
El receptor es alimentado por el controlador del motor, es decir, las salidas 5V y 0V.
Las salidas M1 están conectadas a dos motores DC mientras que las salidas M2 están conectadas a los otros dos motores.
El terminal positivo de la batería está conectado al terminal positivo (+) del controlador del motor, mientras que el terminal negativo de la batería está conectado al terminal negativo del controlador del motor.
¿Cómo configuro el controlador de motor Sabertooth?
Cualquiera de los controladores de Sabertooth viene con un conjunto de seis conmutadores. El interruptor 3 es para la batería y está APAGADO. Cuando se utiliza la batería LiPo, el controlador del motor se ocupa y protege la batería para que resista a una mayor cantidad de ciclos de carga y descarga.

- Los interruptores 2,4 y 6 están encendidos
- El interruptor 2 está en ON – la señal de entrada es analógica.
- El interruptor 4 está en ON – es para el modo de control remoto.
- El interruptor 6 está en ON – si se interrumpe la señal del control remoto, el controlador del motor detiene los motores de CC como medida de seguridad.
- El controlador Sabertooth está conectado al receptor e interpreta cada señal recibida desde el control remoto.
- Esto cambia la dirección de los motores dependiendo de la señal recibida, en otras palabras, puedo controlar que el robot se mueva en la dirección que desee.
